FreeRTOS 入门培训
一、初识 FreeRTOS
什么是FreeRTOS?
FreeRTOS是一个开源、小型、可移植的实时操作系统(RTOS)内核,专为微控制器和嵌入式系统设计。自2003年发布以来,它已成为全球数百万设备的核心,尤其是在物联网(IoT)领域。FreeRTOS提供了一系列核心功能:任务管理、任务间通信、时间管理和内存管理等。
给FreeRTOS进行拆解:Free+RTOS
Free:免费,自由(开源)
RTOS:实时操作系统(Real Time Operating System)
什么是RTOS
RTOS 是Real-Time Operating System的缩写,即实时操作系统,是一种专为满足实时性要求设计的操作系统,核心目标是在规定的时间内对外部事件做出响应并完成处理,广泛应用于嵌入式系统、工业控制、汽车电子、航空航天等对响应时间有严格要求的领域。
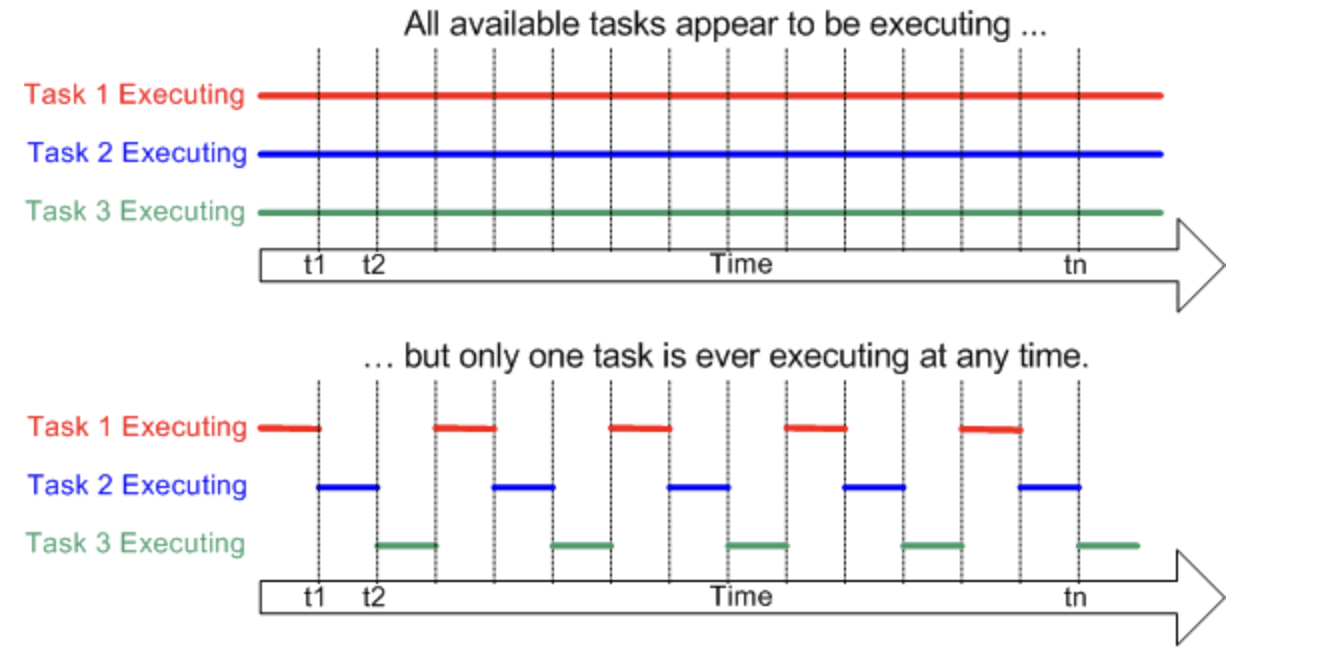
RTOS 的最大优势:实现多任务管理,降低编程的难度
使用RTOS内核的调度,让单核的MCU实现“看上去”的并行处理
除了FreeRTOS,还有很多优秀的RTOS,比如RT-Thread、UCOS等等。
嵌入式的两种开发方式:裸机 VS RTOS
裸机开发(Super Loop)
- 通常结构:
-
特点:
-
所有功能堆在一个大循环中,耦合严重。
- 某个函数阻塞或耗时过长,会导致其它功能“卡死”或响应极慢。
- 难以处理多种不同实时性要求的任务。
RTOS(Real-Time Operating System)
- 将系统拆分为多个任务(Task / Thread),每个任务专注做一件事。
- 内核负责调度任务,让它们看上去“并行”运行。
- 通过优先级、时间片等机制保证实时性。
FreeRTOS
- 轻量级、广泛使用的开源 RTOS 内核。
- 占用资源小,适合 MCU 使用。
- 社区成熟、资料丰富。
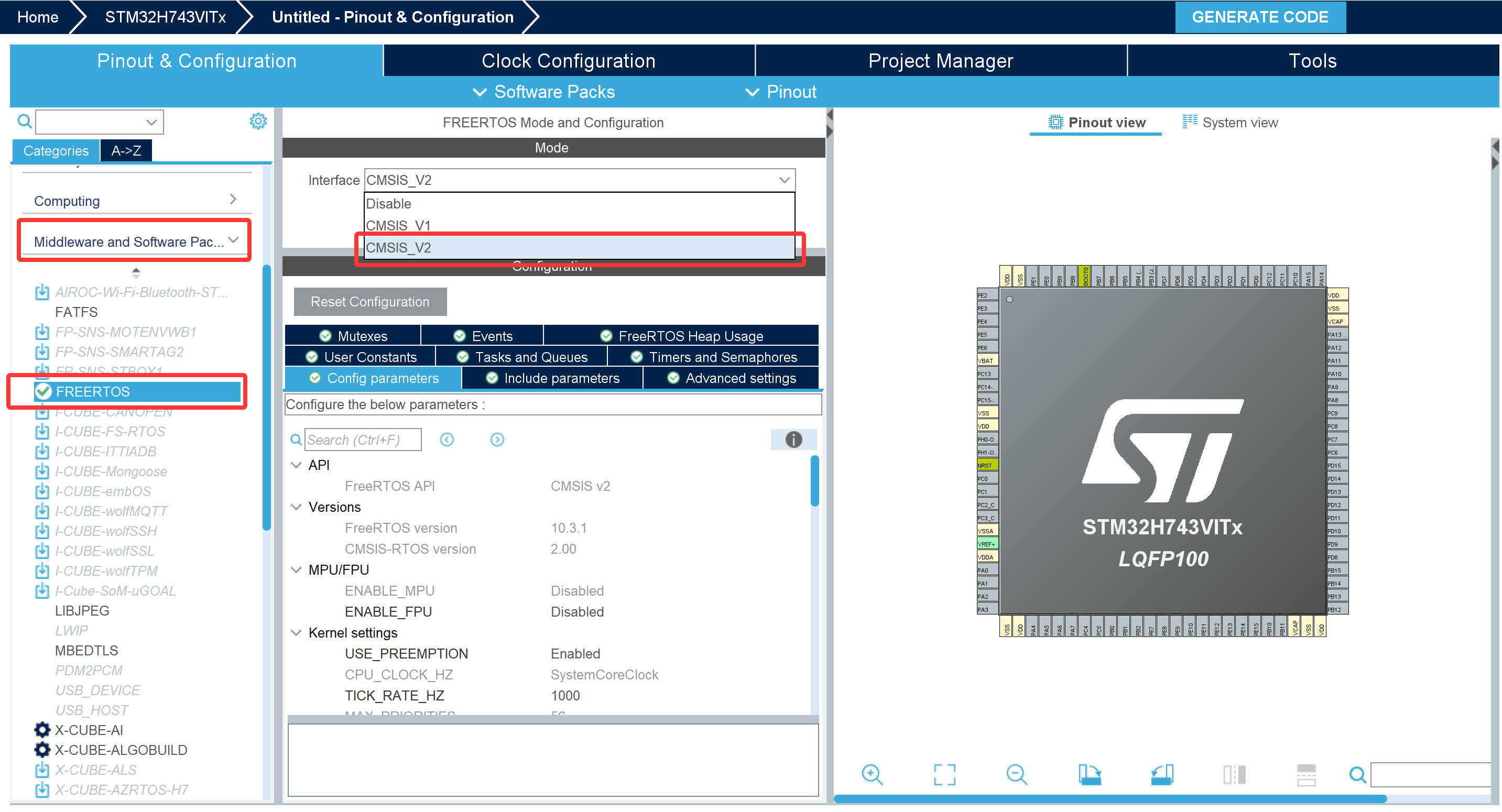
什么是CMSIS-RTOS
CMSIS-RTOS 是ARM公司制定的一个RTOS通用API标准,它提供了一层封装,让你的应用程序可以在不同兼容CMSIS-RTOS 的RTOS(如FreeRTOS、RTX等)之间无缝移植,大大提高了代码的可复用性和可维护性。(就是在不同的RTOS之间提供一个通用的封装层)
与FreeRTOS原生API相比,CMSIS-RTOS 的优势在于:
- 标准化:统一的API接口,降低学习成本
- 可移植性:代码在不同RTOS间迁移更容易
- 中间件兼容性:许多ARM生态的中间件直接支持CMSIS-RTOS v2
STM32CubeMX内置的CMSIS-RTOS 的库,不需要我们繁杂地移植FreeRTOS内核
二、任务管理
任务(Task)的本质
- 任务就是一个无限循环的函数。
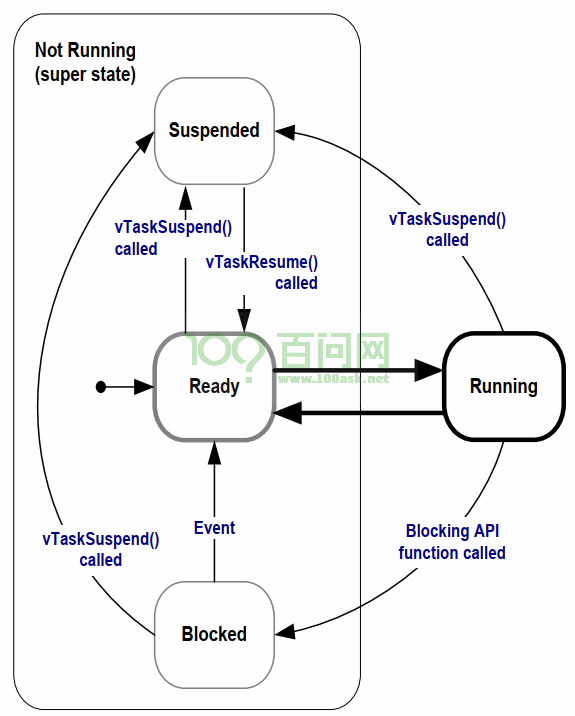
任务状态机
- 运行态(Running)、就绪态(Ready)、阻塞态(Blocked)、挂起态(Suspended)。
| 状态 | 描述 | 关键 API / 事件 |
|---|---|---|
| 运行态 | 正在 CPU 上执行 | 调度器切换 |
| 就绪态 | 等待 CPU 执行权 | xTaskCreate(), vTaskResume(), 事件唤醒 |
| 阻塞态 | 等待某个事件发生 | vTaskDelay(), xQueueReceive(), xSemaphoreTake() |
| 挂起态 | 被强制暂停 | vTaskSuspend(), vTaskResume() |
| 删除态 | 任务被标记为删除并等待资源回收 | vTaskDelete() |
任务优先级
- 优先级数值的含义。
- FreeRTOS的调度策略:抢占式调度。
创建一个任务
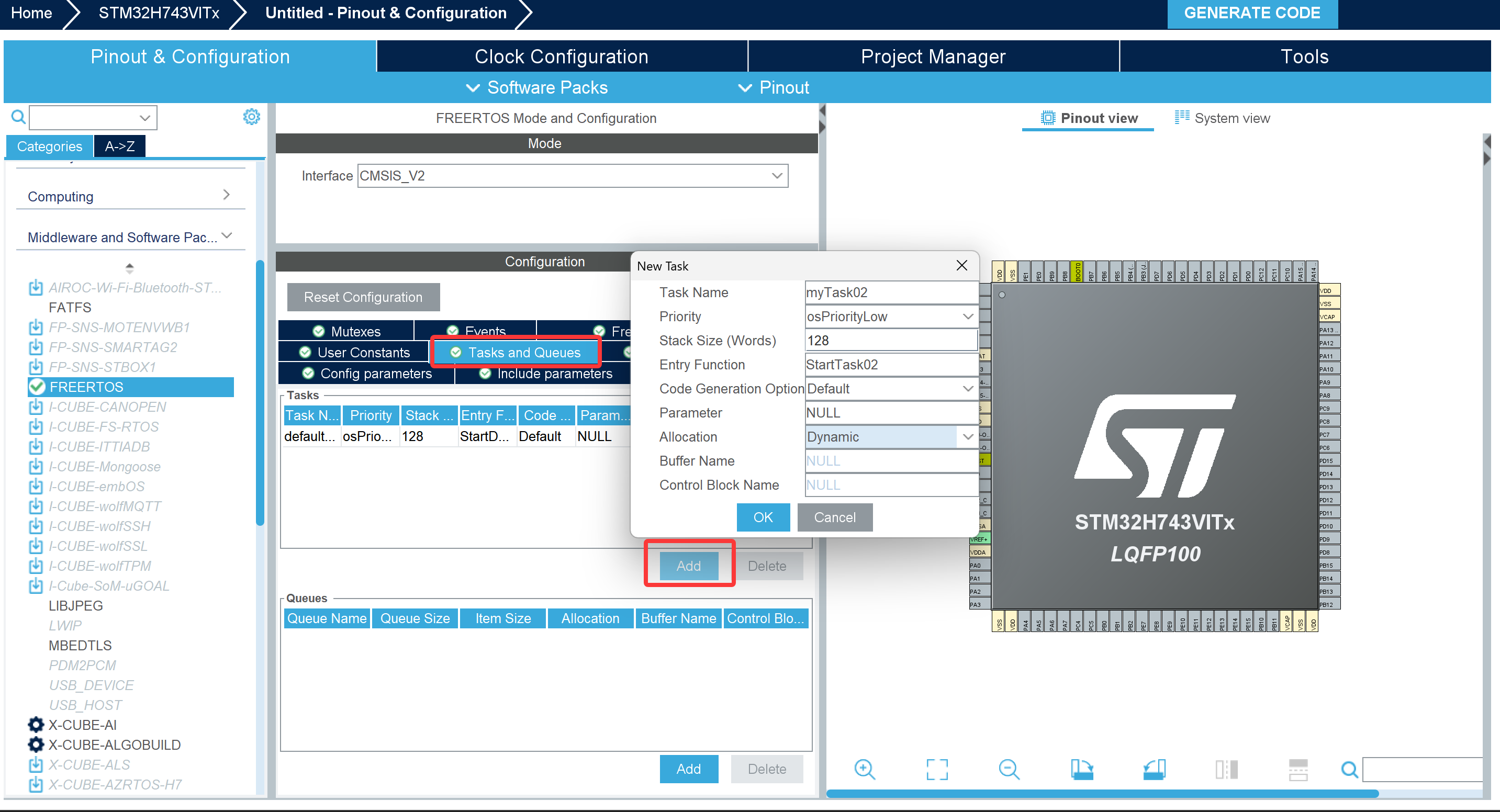
- 任务名称(Task Name):用于标识任务,如示例中的
myTask02,是任务的唯一标识之一。 - 优先级(Priority):设置任务的执行优先级,示例中选择
osPriorityLow(低优先级),优先级决定调度器选择任务的执行顺序。 - 栈大小(Stack Size (Words)):以 “字” 为单位配置任务栈的大小,示例中为
128,栈用于存储任务的局部变量、函数调用上下文等。 - 入口函数(Entry Function):任务开始执行的函数,示例中为
StartTask02,是任务的执行入口。 - 代码生成选项(Code Generation Option):示例中为
Default,用于配置代码生成的策略。 - 参数(Parameter):传递给任务入口函数的参数,示例中为
NULL(表示无参数)。 - 分配方式(Allocation):配置任务资源的分配模式,示例中为
Dynamic(动态分配),也可选择静态分配等方式。
//任务ID句柄(Handle,理解为操作任务的把手)
osThreadId_t LED1Handle;
//任务属性配置结构体 (Attribute 属性)
const osThreadAttr_t LED1_attributes = {
.name = "LED1",
.stack_size = 128 * 4,
.priority = (osPriority_t) osPriorityNormal,
};
//任务初始化
LED1Handle = osThreadNew(LED1_Task, NULL, &LED1_attributes);
//任务函数的声明
void LED1_Task(void *argument);
//任务函数的实现
__weak void LED1_Task(void *argument)
{
/* USER CODE BEGIN LED1_Task */
/* Infinite loop */
for(;;)
{
osDelay(1);
}
/* USER CODE END LED1_Task */
}
//若为虚函数,则可以在其他位置重复实现
osThreadId_t - 任务句柄类型
作用:任务的身份标识符,“Handle” 操作把手
- 类似于文件操作中的文件句柄
- 用于后续对任务进行管理和操作
- 每个任务都有唯一的
osThreadId_t
osThreadAttr_t - 任务属性结构体
typedef struct {
const char *name; // 任务名称(字符串标识)
uint32_t attr_bits; // 属性位(保留,通常为0)
void *cb_mem; // 控制块内存(通常为NULL,自动分配)
uint32_t cb_size; // 控制块大小(通常为0)
void *stack_mem; // 堆栈内存(通常为NULL,自动分配)
uint32_t stack_size; // 堆栈大小(字节)
osPriority_t priority; // 任务优先级
TZ_ModuleId_t tz_module; // TrustZone模块ID(安全扩展)
uint32_t reserved; // 保留字段
} osThreadAttr_t;
osKernelInitialize(): 初始化 RTOS 内核。osThreadNew(): 创建一个新任务。osKernelStart(): 启动调度器 (一旦启动,不再返回main函数)。osDelay(n): 它会让当前任务进入阻塞(Blocked) 状态,CPU 会立即切换去运行其他就绪的任务。如果是裸机的HAL_Delay,CPU 会在死循环里空转,浪费资源且无法切换任务。
定义任务函数 → 配置任务属性 → 定义任务句柄 → 把任务函数交给任务句柄 → 内核调度
任务管理
任务创建与删除
// 创建新任务
osThreadId_t osThreadNew(osThreadFunc_t func, void *argument, const osThreadAttr_t *attr);
// 终止指定任务
osStatus_t osThreadTerminate(osThreadId_t thread_id);
// 终止当前任务
void osThreadExit(void);
任务挂起与恢复
// 挂起指定任务(暂停执行)
osStatus_t osThreadSuspend(osThreadId_t thread_id);
// 恢复指定任务(继续执行)
osStatus_t osThreadResume(osThreadId_t thread_id);
任务状态控制
// 获取任务当前状态
osThreadState_t osThreadGetState(osThreadId_t thread_id);
// 让出CPU时间片(同优先级任务轮转)
osStatus_t osThreadYield(void);
三、消息队列
消息队列特性
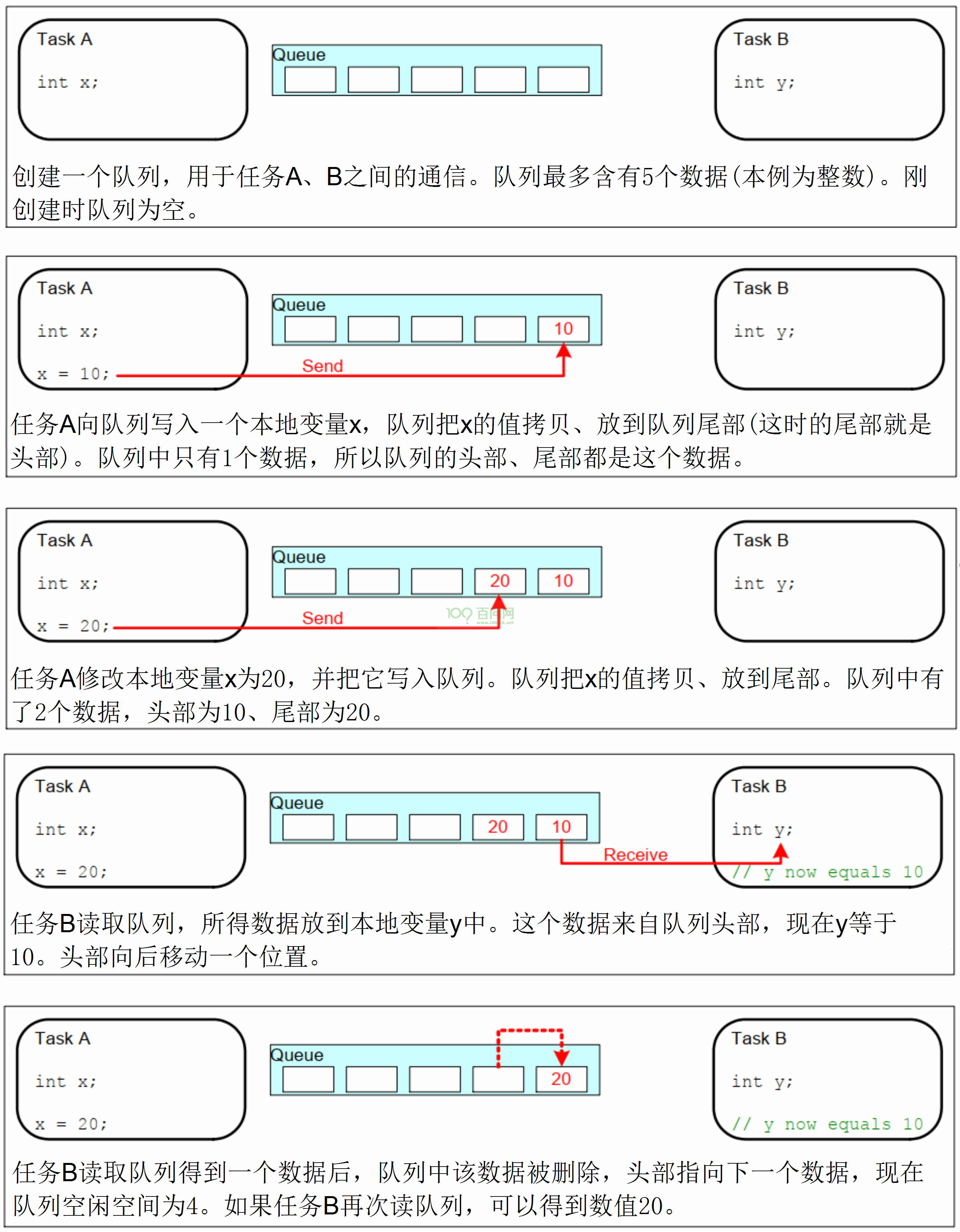
消息队列(Message Queue):RTOS 内核里的一块 FIFO 缓冲区,用来在任务之间传递固定大小的“消息单元”。
- 队列可以包含若干个数据:队列中有若干项,这被称为"长度"(length)
- 每个数据大小固定
- 创建队列时就要指定长度、数据大小
- 数据的操作采用先进先出的方法(FIFO,First In First Out):写数据时放到尾部,读数据时从头部读
-
也可以强制写队列头部:覆盖头部数据
-
每个队列有两个关键参数:
msg_count:最多能存多少条消息。msg_size:每条消息占多少字节(可以是uint32_t、enum、struct等)。
典型使用模式:
- 任务 A(生产者)
osMessageQueuePut→ 往队列塞一条消息 - 任务 B(消费者)
osMessageQueueGet→ 从队列取消息,阻塞/等待直到有消息
使用消息队列进行通信
创建消息队列
osMessageQueueId_t osMessageQueueNew (uint32_t msg_count,
uint32_t msg_size,
const osMessageQueueAttr_t *attr);
osStatus_t osMessageQueuePut (osMessageQueueId_t mq_id,
const void *msg_ptr,
uint8_t msg_prio,
uint32_t timeout);
-
mq_id:队列句柄。 -
msg_ptr:指向要发送的数据的指针(大小必须等于创建时的msg_size)。 -
msg_prio:消息优先级(0 为普通,数值越大优先级越高,很多场景用 0 足够)。 -
timeout:当队列满时的等待时间:0:不等待,满了就立即返回osErrorResource。osWaitForever:一直等到有空位。
-
其他值:等待指定毫秒数。
-
返回值常见值:
-
osOK:发送成功。 -
osErrorResource:队列满且不等待,或超时仍无空位。 -
osErrorParameter:参数错误。 -
osErrorTimeout:在timeout时间内一直满,最终超时。
接收消息
osStatus_t osMessageQueueGet (osMessageQueueId_t mq_id,
void *msg_ptr,
uint8_t *msg_prio,
uint32_t timeout);
-
参数说明:
-
mq_id:队列句柄。 -
msg_ptr:接收消息的缓冲区指针,大小应 ≥msg_size。 -
msg_prio:输出参数,返回这条消息的优先级;如不关心,可以传NULL。 -
timeout:当队列为空时的等待时间:0:不等待,若为空立即返回osErrorResource。osWaitForever:一直等到有消息。- 其他值:等待指定毫秒数。
-
返回值常见值:
-
osOK:成功取到一条消息。 osErrorResource:队列为空且不等待,或等待期间一直没有消息。osErrorTimeout:等待超时。osErrorParameter:参数错误。
示例:使用消息队列控制蜂鸣器
#include "cmsis_os.h"
#include "main.h"
//声明队列句柄
osMessageQueueId_t buzz_stateHandle;
const osMessageQueueAttr_t buzz_attributes = {
.name = "buzz"
};
void key_scan_Task(void *argument)
{
uint8_t k1_state = 1; uint8_t k2_state = 1; uint8_t k1_state_last = 1;uint8_t k2_state_last = 1;
for(;;)
{
k1_state = HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_4);
k2_state = HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_3);
if(!k1_state && k1_state_last)
{
// osThreadSuspend(LED1Handle);
}
if(!k2_state && k2_state_last)
{
// osThreadResume(LED1Handle);
}
// uint8_t led_on = (k1_state == 0) ? GPIO_PIN_RESET : GPIO_PIN_SET;
// osMessageQueuePut(led_stateHandle, &led_on, 0, 0);
uint8_t buzzer = k2_state;
osMessageQueuePut(buzz_stateHandle, &buzzer, 0, 0);
k1_state_last = k1_state; k2_state_last = k2_state;
osDelay(1);
}
}
void Buzzer_Task(void *argument)
{
uint8_t buzz = 0;
buzz_stateHandle = osMessageQueueNew (16, sizeof(uint8_t), &buzz_attributes);
for(;;)
{
osStatus_t status = osMessageQueueGet(buzz_stateHandle, &buzz, NULL, 0);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, !buzz);
osDelay(1);
}
}
百问网《FreeRTOS入门与工程实践-基于STM32F103》教程-基于DShanMCU-103(STM32F103) | 百问网
[CMSIS-RTOS2: Overview](https://arm-software.github.io/CMSIS_6/latest/RTOS2/index.html)
[野火]FreeRTOS 内核实现与应用开发实战—基于STM32 — FreeRTOS内核实现与应用开发实战指南—基于STM32 文档